隔离与限制
基于 Linux Namespace 的隔离机制相比于虚拟化技术也有很多不足之处,其中最主要的问题就是:隔离得不彻底。
- 首先,既然容器只是运行在宿主机上的一种特殊的进程,那么多个容器之间使用的就还是同一个宿主机的操作系统内核。
- 其次,在 Linux 内核中,有很多资源和对象是不能被 Namespace 化的,最典型的例子就是:时间。
- 尽管在实践中我们确实可以使用 Seccomp 等技术,对容器内部发起的所有系统调用进行过滤和甄别来进行安全加固,但这种方法因为多了一层对系统调用的过滤,一定会拖累容器的性能。何况,默认情况下,谁也不知道到底该开启哪些系统调用,禁止哪些系统调用。
Linux Cgroups 就是 Linux 内核中用来为进程设置资源限制的一个重要功能。
Linux Cgroups 的全称是 Linux Control Group。它最主要的作用,就是限制一个进程组能够使用的资源上限,包括 CPU、内存、磁盘、网络带宽等等。
- 问题:
众所周知,Linux 下的 /proc 目录存储的是记录当前内核运行状态的一系列特殊文件,用户可以通过访问这些文件,查看系统以及当前正在运行的进程的信息,比如 CPU 使用情况、内存占用率等,这些文件也是 top 指令查看系统信息的主要数据来源。但是,你如果在容器里执行 top 指令,就会发现,它显示的信息居然是宿主机的 CPU 和内存数据,而不是当前容器的数据。造成这个问题的原因就是,/proc 文件系统并不知道用户通过 Cgroups 给这个容器做了什么样的资源限制,即:/proc 文件系统不了解 Cgroups 限制的存在。
- 解决办法:
把宿主机的 /var/lib/lxcfs/proc/memoinfo 文件挂载到Docker容器的/proc/meminfo位置后。容器中进程读取相应文件内容时,LXCFS的FUSE实现会从容器对应的Cgroup中读取正确的内存限制。
容器镜像
对 Docker 项目来说,它最核心的原理实际上就是为待创建的用户进程:
- 启用 Linux Namespace 配置;
- 设置指定的 Cgroups 参数;
- 切换进程的根目录(Change Root)。
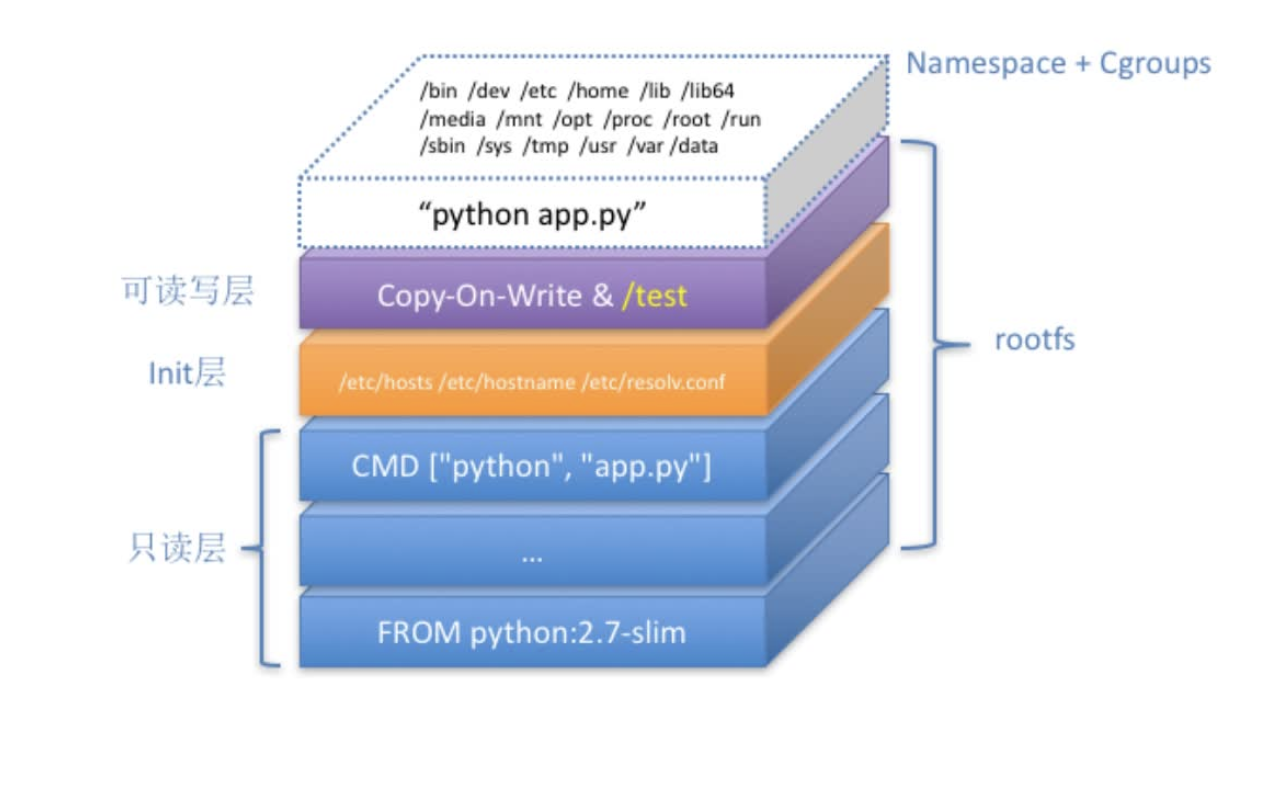
rootfs:它只是一个操作系统的所有文件和目录,并不包含内核,最多也就几百兆。而相比之下,传统虚拟机的镜像大多是一个磁盘的“快照”,磁盘有多大,镜像就至少有多大。
通过结合使用 Mount Namespace 和 rootfs,容器就能够为进程构建出一个完善的文件系统隔离环境。当然,这个功能的实现还必须感谢 chroot 和 pivot_root 这两个系统调用切换进程根目录的能力。
- 在一个正确的时机,进行一次绑定挂载,Docker 就可以成功地将一个宿主机上的目录或文件,不动声色地挂载到容器中。
为什么需要POD
k8S比作操作系统的话,容器就是一个个进程,pod就是虚拟机
Pod,实际上是在扮演传统基础设施里“虚拟机”的角色;而容器,则是这个虚拟机里运行的用户程序。
Pod 最重要的一个事实是:它只是一个逻辑概念。
- Pod 里的所有容器,共享的是同一个 Network Namespace,并且可以声明共享同一个 Volume。
深入解析pod
- 凡是调度、网络、存储,以及安全相关的属性,基本上是 Pod 级别的。
控制器模型
- Deployment 实际上是一个两层控制器。首先,它通过ReplicaSet 的个数来描述应用的版本;然后,它再通过ReplicaSet 的属性(比如 replicas的值),来保证 Pod 的副本数量。
StatefulSet 的设计其实非常容易理解。它把真实世界里的应用状态,抽象为了两种情况:
1.拓扑状态。这种情况意味着,应用的多个实例之间不是完全对等的关系。这些应用实例,必须按照某些顺序启动,比如应用的主节点 A 要先于从节点 B 启动。而如果你把 A和 B 两个 Pod 删除掉,它们再次被创建出来时也必须严格按照这个顺序才行。并且,新创建出来的 Pod,必须和原来 Pod 的网络标识一样,这样原先的访问者才能使用同样的方法,访问到这个新 Pod。
2.存储状态。这种情况意味着,应用的多个实例分别绑定了不同的存储数据。对于这些应用实例来说,Pod A 第一次读取到的数据,和隔了十分钟之后再次读取到的数据,应该是同一份,哪怕在此期间 Pod A 被重新创建过。这种情况最典型的例子,就是一个数据库应用的多个存储实例。所以,StatefulSet 的核心功能,就是通过某种方式记录这些状态,然后在 Pod 被重新创建时,能够为新 Pod 恢复这些状态。
- Headless Service 不需要分配一个 VIP,而是可以直接以 DNS 记录的方式解析出被代理 Pod 的 IP 地址。
- StatefulSet 这个控制器的主要作用之一,就是使用 Pod 模板创建 Pod 的时候,对它们进行编号,并且按照编号顺序逐一完成创建工作。而当StatefulSet 的“控制循环”发现 Pod 的“实际状态”与“期望状态”不一致,需要新建或者删除 Pod 进行“调谐”的时候,它会严格按照这些 Pod编号的顺序,逐一完成这些操作。
声明式API
- 首先,所谓“声明式”,指的就是我只需要提交一个定义好的 API 对象来“声明”,我所期望的状态是什么样子。
- 其次,“声明式 API”允许有多个 API 写端,以 PATCH 的方式对 API 对象进行修改,而无需关心本地原始 YAML 文件的内容。
- 最后,也是最重要的,有了上述两个能力,Kubernetes 项目才可以基于对 API 对象的增、删、改、查,在完全无需外界干预的情况下,完成对“实际状态”和“期望状态”的调谐(Reconcile)过程。
Dynamic Admission Controller
k8s initializer的原理,在pod的metadata中添加initializers pedding字段,进入Admission Controller处理完成后将字段删除
一个 API 对象在 Etcd 里的完整资源路径,是由:Gro
自定义控制器
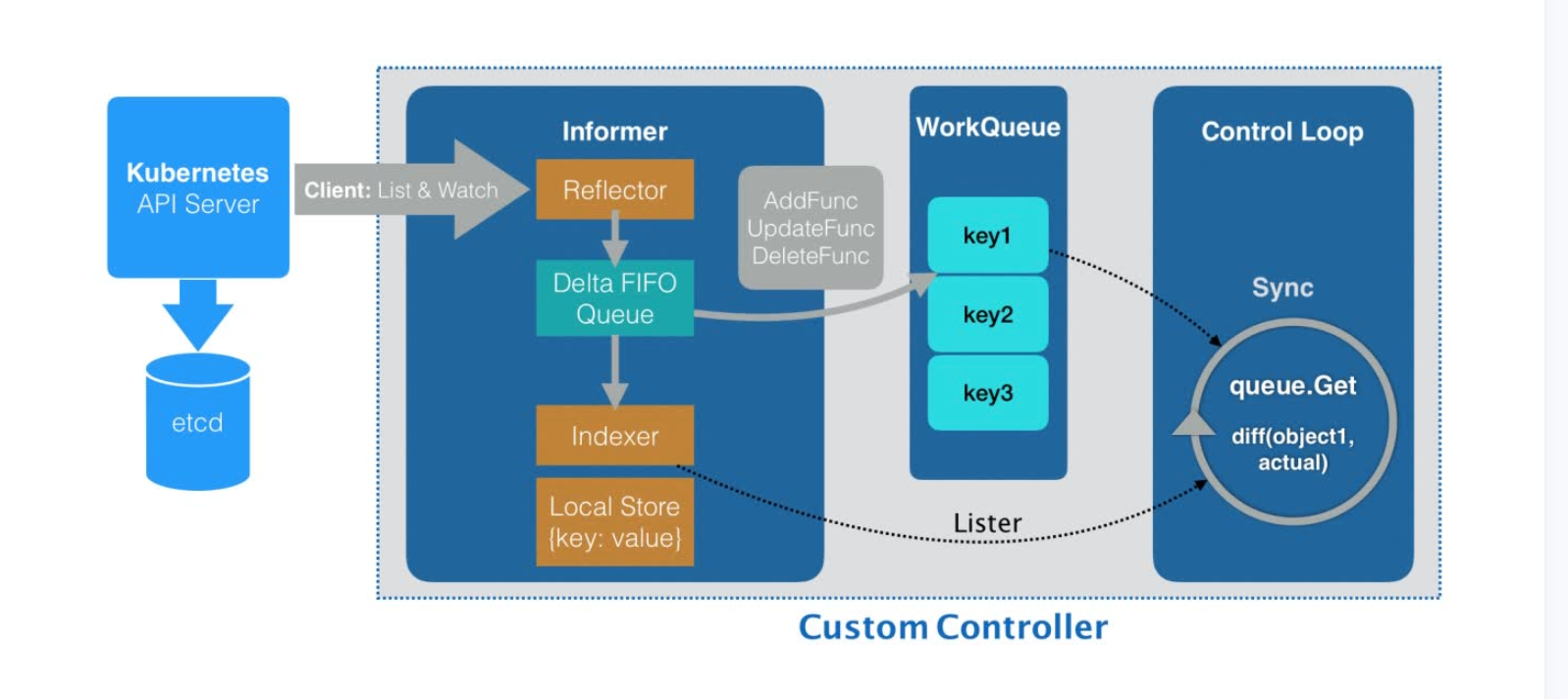
- 所谓 Informer,其实就是一个带有本地缓存和索引机制的、可以注册 EventHandler 的 client。它是自定义控制器跟 APIServer 进行数据同步的重要组件。
- Informer 通过一种叫作 ListAndWatch 的方法,把 APIServer 中的 API 对象缓存在了本地,并负责更新和维护这个缓存。
PV,PVC,StorageClass
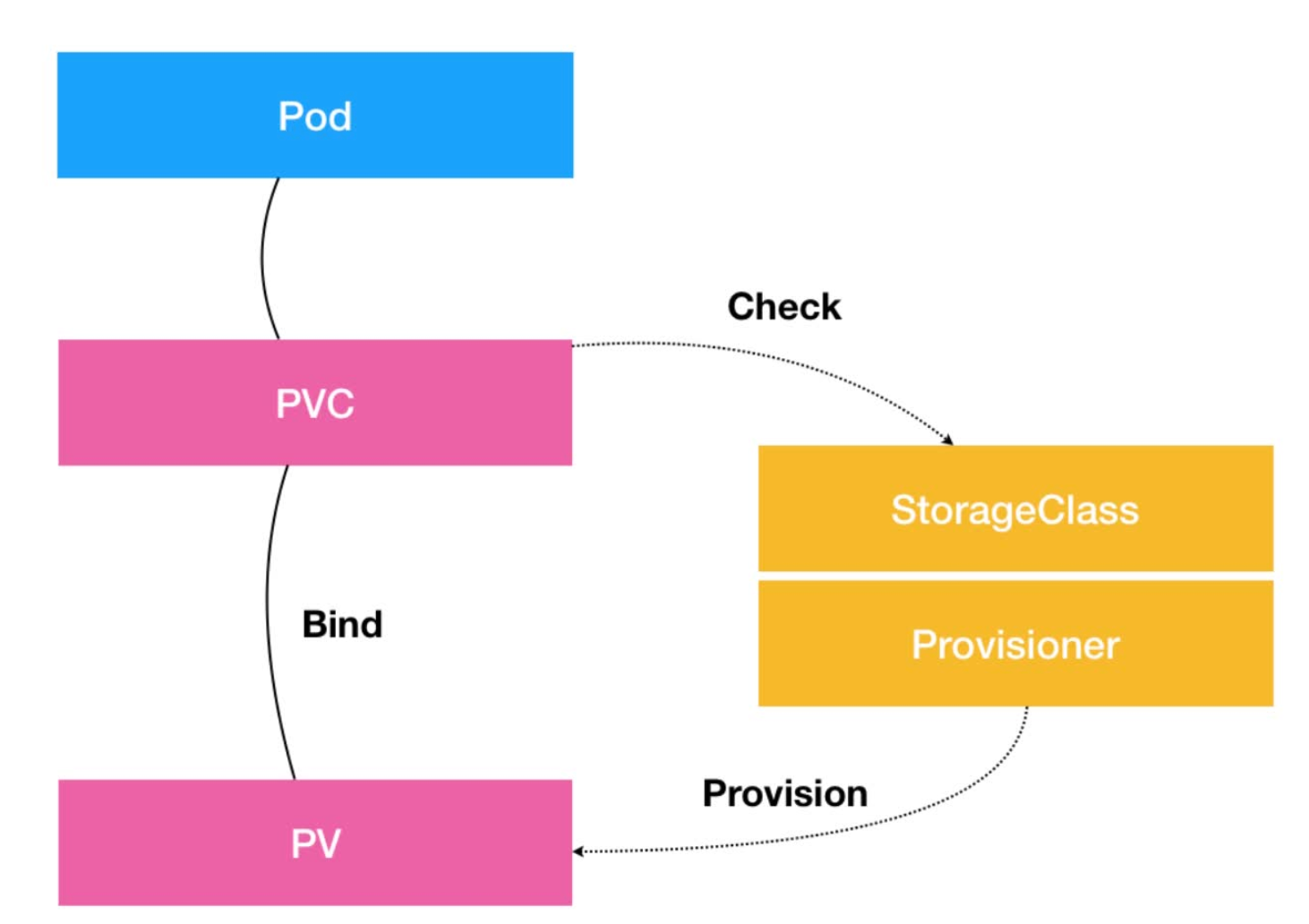
PVC 描述的,是 Pod 想要使用的持久化存储的属性,比如存储的大小、读写权限等。
PV 描述的,则是一个具体的 Volume 的属性,比如 Volume 的类型、挂载目录、远程存储服务器地址等。
而 StorageClass 的作用,则是充当 PV 的模板。并且,只有同属于一个 StorageClass的 PV 和 PVC,才可以绑定在一起。
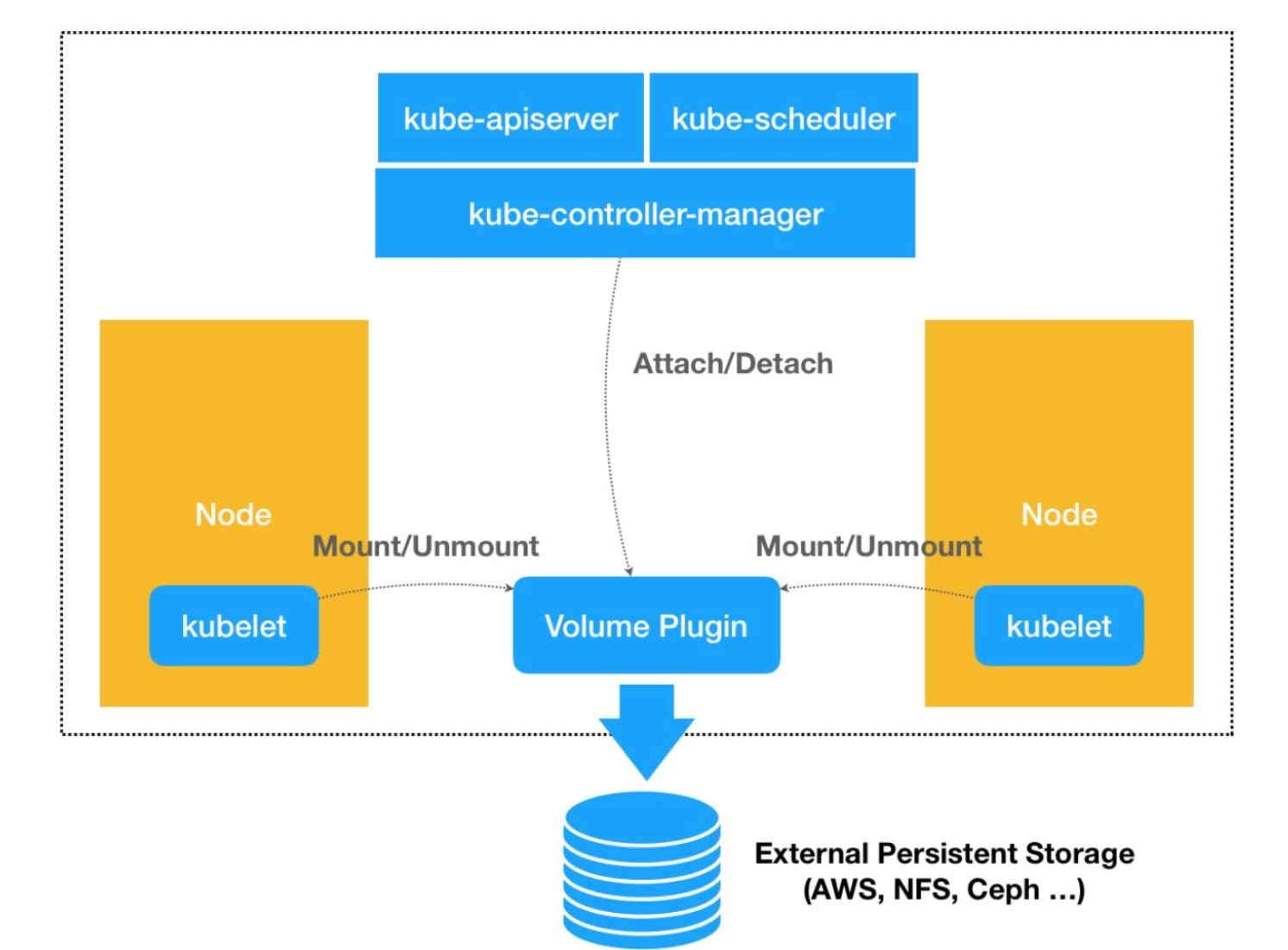
CSI
CNI
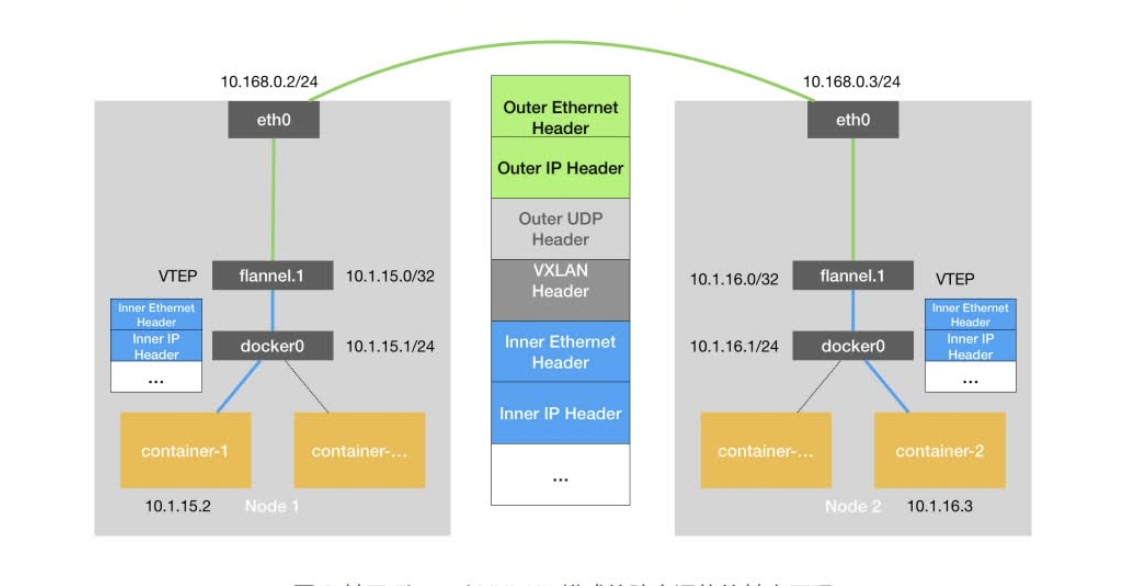
Fannel原理
host-gw

calico
- BGP 的全称是 Border Gateway Protocol,即:边界网关协议。它是一个 Linux 内核原生就支持的、专门用在大规模数据中心里维护不同的“自治系统”之间路由信息的、无中心的路由协议。
- 所谓 BGP,就是在大规模网络中实现节点路由信息共享的一种协议。而 BGP 的这个能力,正好可以取代 Flannel 维护主机上路由表的功能。而且,BGP 这种原生就是为大规模网络环境而实现的协议,其可靠性和可扩展性,远非 Flannel 自己的方案可比。
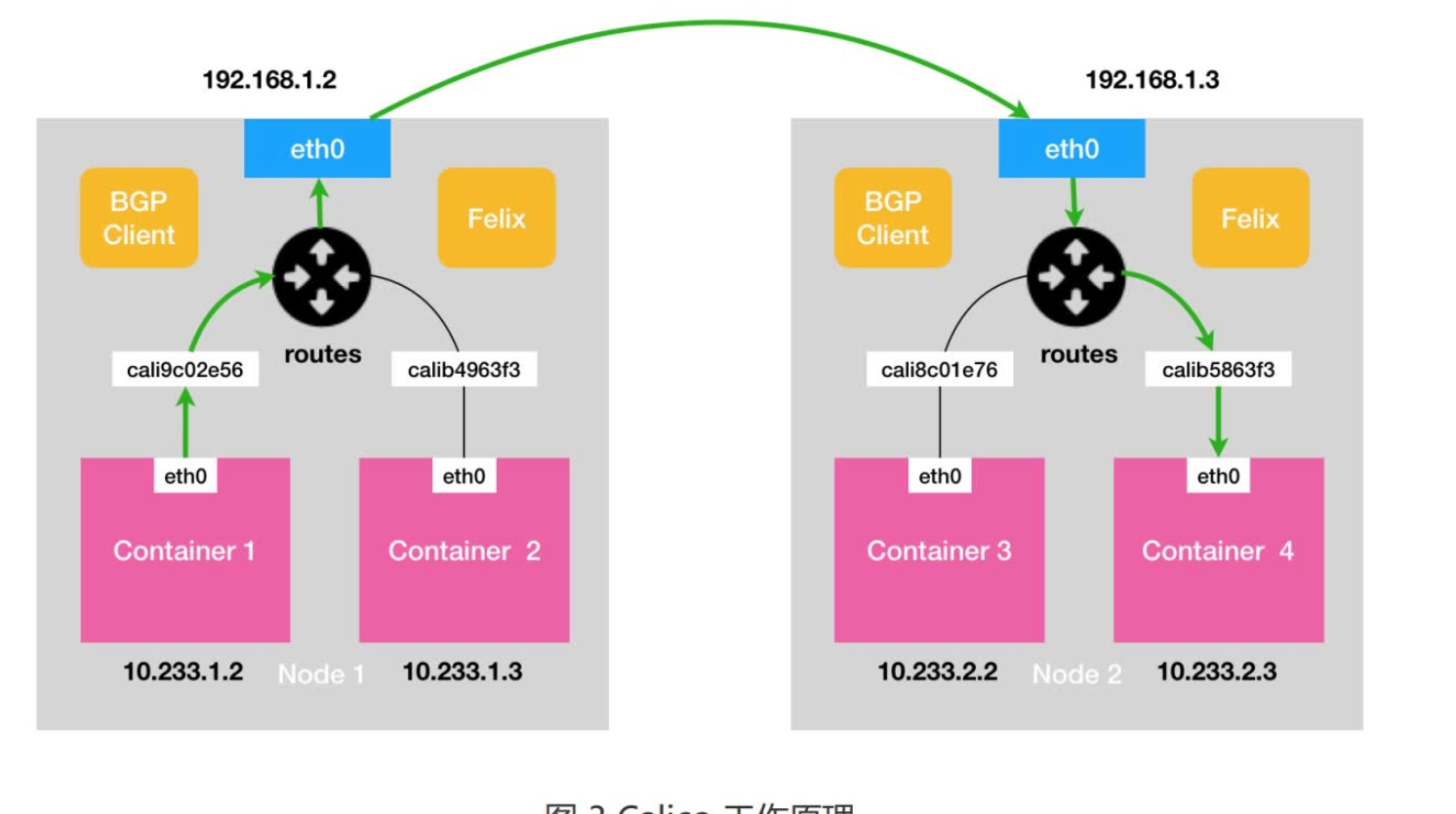
Calico 项目的架构就非常容易理解了。它由三个部分组成:
- Calico 的 CNI 插件。这是 Calico 与 Kubernetes 对接的部分。
- Felix。它是一个 DaemonSet,负责在宿主机上插入路由规则(即:写入 Linux 内核的FIB 转发信息库),以及维护 Calico 所需的网络设备等工作。
- BIRD。它就是 BGP 的客户端,专门负责在集群里分发路由规则信息。
- Calico 维护的网络在默认配置下,是一个被称为“Node-to-Node Mesh”的模式。这时候,每台宿主机上的 BGP Client 都需要跟其他所有节点的 BGPClient 进行通信以便交换路由信息。但是,随着节点数量 N 的增加,这些连接的数量就会以 N²的规模快速增长,从而给集群本身的网络带来巨大的压力。所以,Node-to-Node Mesh 模式一般推荐用在少于 100 个节点的集群里。而在更大规模的集群中,你需要用到的是一个叫作 Route Reflector 的模式。
Networkpolicy
- Kubernetes 网络插件对 Pod 进行隔离,其实是靠在宿主机上生成NetworkPolicy 对应的 iptable 规则来实现的。
Service/DNS
- kube-proxy 通过 iptables 处理 Service 的过程,其实需要在宿主机上设置相当多的 iptables 规则。而且,kube-proxy 还需要在控制循环里不断地刷新这些规则来确保它们始终是正确的。
- IPVS 在内核中的实现其实也是基于 Netfilter 的 NAT 模式,所以在转发这一层上,理论上 IPVS 并没有显著的性能提升。但是,IPVS 并不需要在宿主机上为每个 Pod 设置 iptables 规则,而是把对这些“规则”的处理放到了内核态,从而极大地降低了维护这些规则的代价。
- IPVS 模块只负责上述的负载均衡和代理功能。而一个完整的 Service流程正常工作所需要的包过滤、SNAT 等操作,还是要靠 iptables 来实现。只不过,这些辅助性的 iptables 规则数量有限,也不会随着 Pod 数量的增加而增加。
- 所谓 Service,其实就是 Kubernetes 为 Pod 分配的、固定的、基于 iptables(或者 IPVS)的访问入口。而这些访问入口代理的 Pod 信息,则来自于Etcd,由 kube-proxy 通过控制循环来维护。
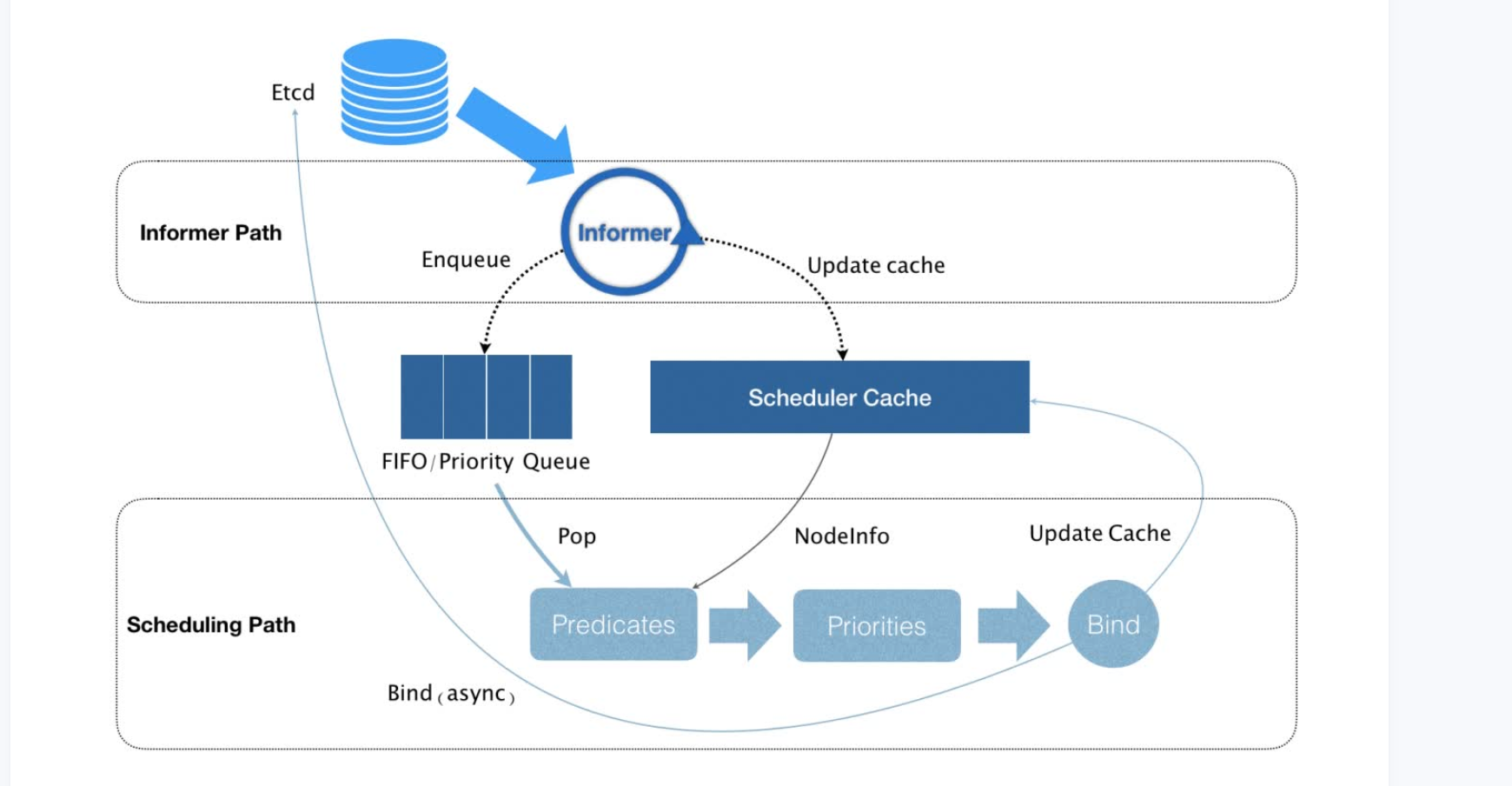
调度器
- 从集群所有的节点中,根据调度算法挑选出所有可以运行该 Pod 的节点;
- 从第一步的结果中,再根据调度算法挑选一个最符合条件的节点作为最终结果。
默认调度器会首先调用一组叫作 Predicate 的调度算法,来检查每个 Node。然后,再调用一组叫作 Priority 的调度算法,来给上一步得到的结果里的每个 Node 打分。最终的调度结果,就是得分最高的那个 Node。
CRI
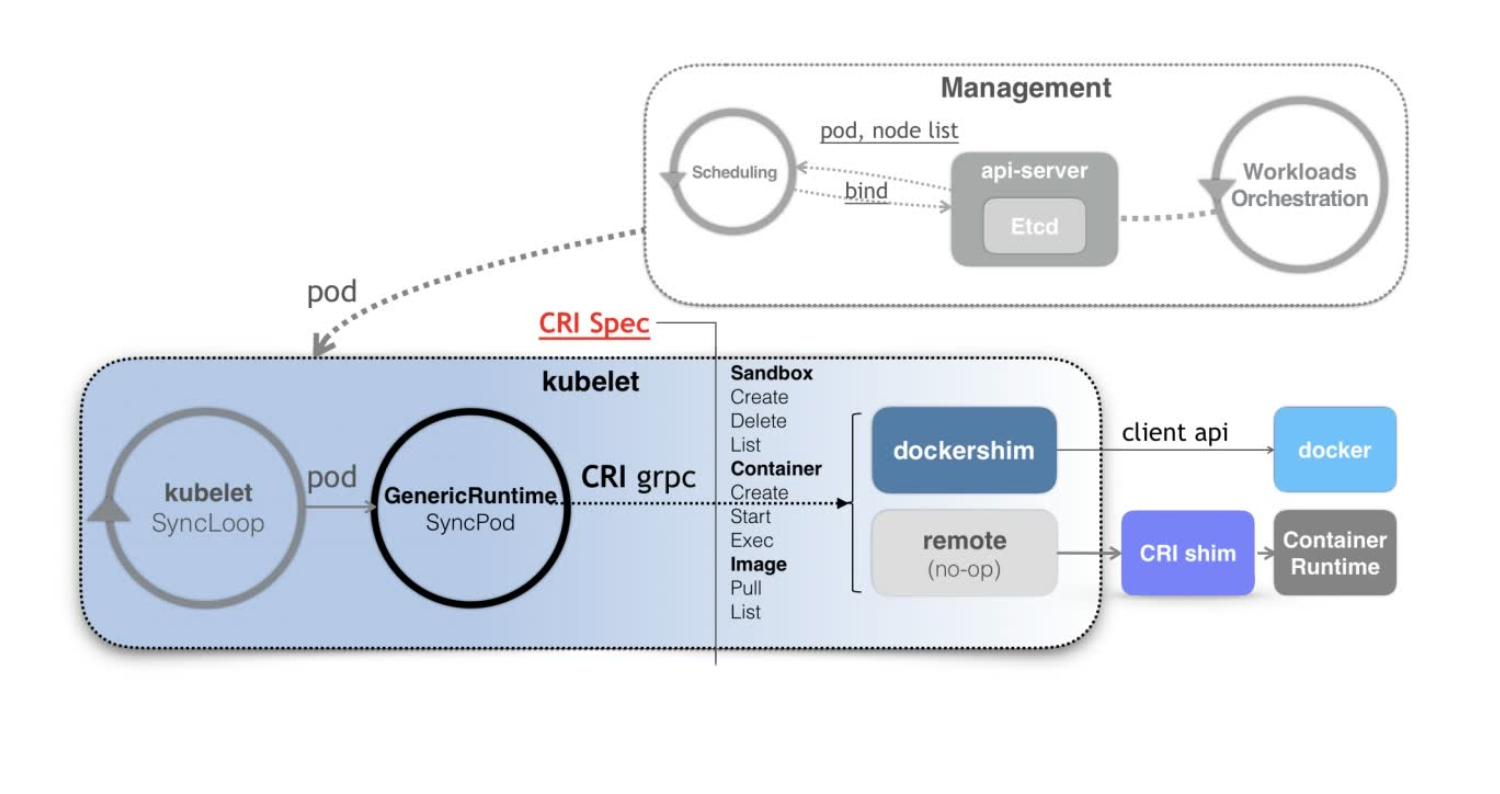
当 Kubernetes 通过编排能力创建了一个 Pod 之后,调度器会为这个 Pod 选择一个具体的节点来运行。这时候,kubelet 当然就会通过前面讲解过的 SyncLoop 来判断需要执行的具体操作,比如创建一个 Pod。那么此时,kubelet 实际上就会调用一个叫作GenericRuntime 的通用组件来发起创建 Pod 的 CRI 请求。
如果你使用的容器项目是 Docker 的话,那么负责响应这个请求的就是一个叫作dockershim 的组件。它会把 CRI 请求里的内容拿出来,然后组装成 Docker API 请求发给Docker Daemon。